Robô autônomo navega pelo pulmão vivo para extrair tumores inalcançáveis
Redação do Diário da Saúde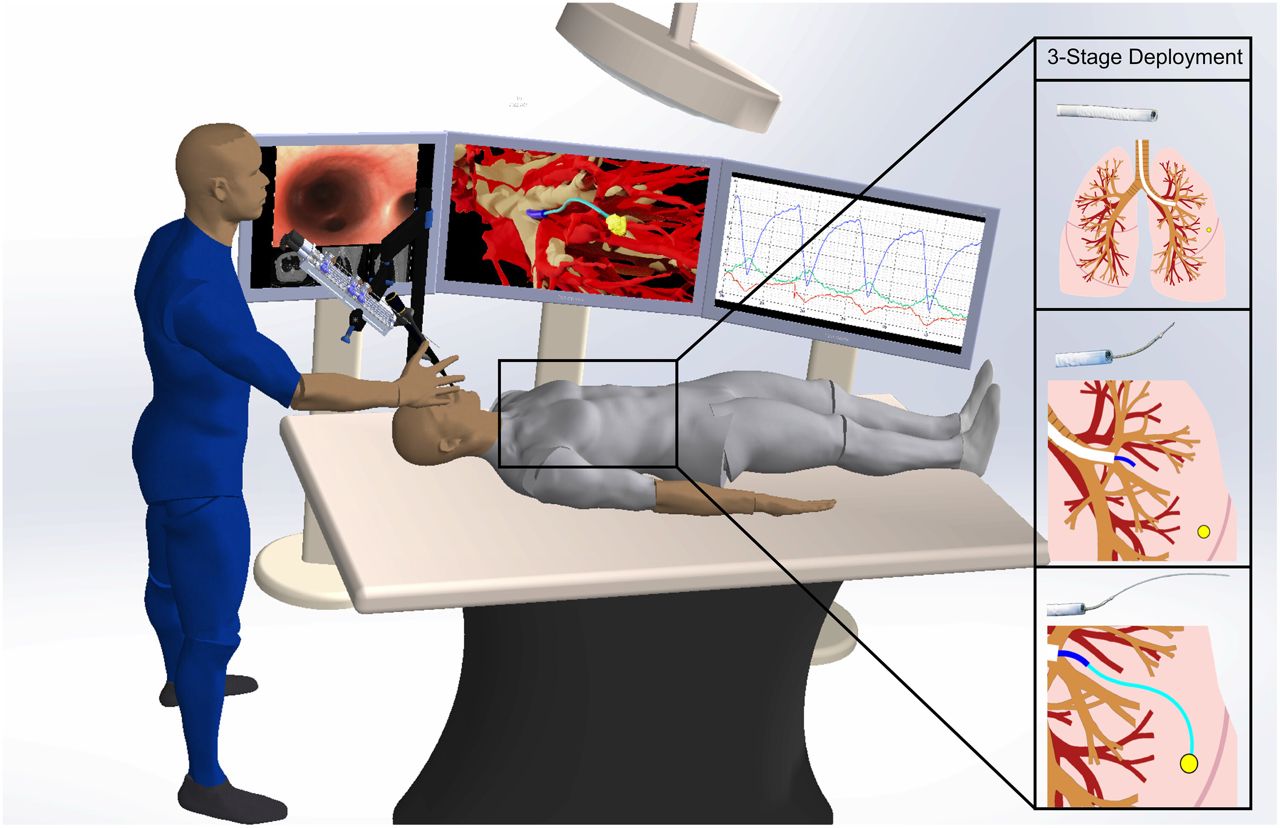
[Imagem: Alan Kuntz et al. - 10.1126/scirobotics.adf7614]
Operar câncer de pulmão
Embora muito comum, o câncer de pulmão ainda tem um prognóstico muito ruim: Alguns tumores são minúsculos e escondem-se profundamente no tecido pulmonar, dificultando o acesso dos cirurgiões.
Para tentar superar essa dificuldade, Alan Kuntz e colegas das universidades da Carolina do Norte e Vanderbilt (EUA) decidiram encontrar cirurgiões além da capacidade humana - mais especificamente, um robô cirurgião.
O desafio não é fácil porque robôs costumam ser duros e rígidos, e operar o pulmão exige um equipamento resistente mas extremamente flexível.
Os primeiros passos foram dados, e a equipe acaba de demonstrar que seu robô consegue ir por contra própria de um "ponto A" para um "ponto B", evitando por contra própria estruturas importantes, como pequenas vias aéreas e vasos sanguíneos. Ao funcionar autonomamente - um "robô sem motorista", por assim dizer - o equipamento deixa de depender do talento do cirurgião, podendo acessar e operar tumores menores.
"Esta tecnologia nos permite atingir alvos que de outra forma não conseguiríamos com um broncoscópio padrão ou mesmo robótico," disse o Dr. Jason Akulian, membro da equipe. "Isso dá a você alguns centímetros ou até mesmo alguns milímetros extras, o que ajudará imensamente na perseguição de pequenos alvos nos pulmões."
[Imagem: Alan Kuntz et al. - 10.1126/scirobotics.adf7614]
Robô para operar o pulmão
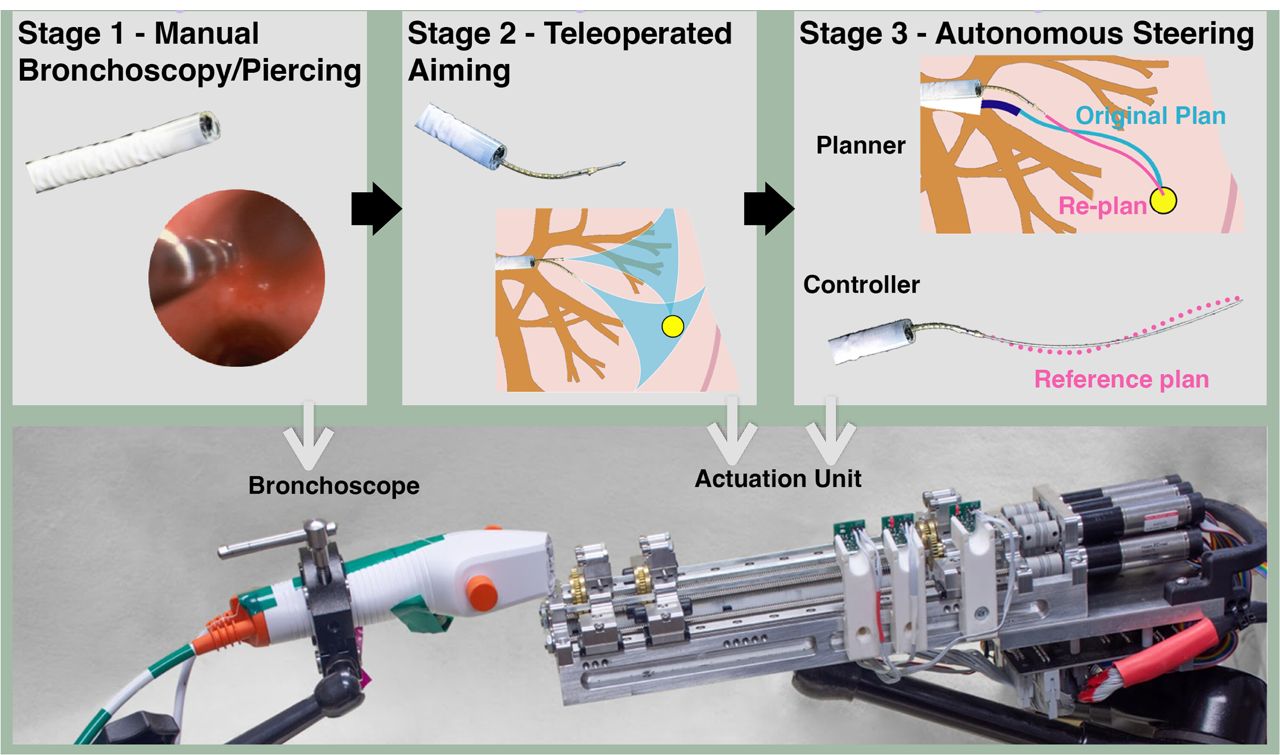
O robô é formado por vários componentes separados. Um controle mecânico fornece impulso controlado da agulha para avançar e retroceder, e o design da agulha permite navegar ao longo de caminhos curvos. A agulha é feita de uma liga de níquel-titânio e foi ranhurada a laser para aumentar sua flexibilidade, permitindo que ela se mova sem esforço através do tecido.
À medida que avança, as ranhuras na agulha permitem-lhe contornar obstáculos com facilidade. Outros acessórios, como cateteres, podem ser usados junto com a agulha para realizar procedimentos adicionais, como biópsias pulmonares.
Para atravessar o tecido, a agulha precisa saber para onde está indo. O "GPS pulmonar" foi criado usando tomografias computadorizadas da cavidade torácica do paciente, e um programa de inteligência artificial cria modelos tridimensionais do pulmão, incluindo as vias aéreas, vasos sanguíneos e o alvo escolhido. Usando este modelo 3D, basta colocar a agulha no ponto de partida que o software orientado por IA instrui a agulha a viajar automaticamente até seu destino, evitando estruturas importantes.
"Ainda existem algumas nuances em termos da capacidade do robô de alcançar os alvos e, em seguida, alcançá-los de forma eficaz, e, e embora ainda haja muito trabalho a ser feito, estou muito entusiasmado em continuar a ultrapassar os limites de o que podemos fazer pelos pacientes," disse Akulian.
Artigo: Autonomous medical needle steering in vivo
Autores: Alan Kuntz, Maxwell Emerson, Tayfun Efe Ertop, Inbar Fried, Mengyu Fu, Janine Hoelscher, Margaret Rox, Jason Akulian, Erin A. Gillaspie, Yueh Z. Lee, Fabien Maldonado, Robert J. Webster III, Ron Alterovitz
Publicação: Science Robotics
Vol.: 8, Issue 82
DOI: 10.1126/scirobotics.adf7614

| Ver mais notícias sobre os temas: | |||
Robótica | Cirurgias | Sistema Respiratório | |
| Ver todos os temas >> | |||
Fitoterápico chinês trata demência e ainda rejuvenesce cobaias
O que ficar de pé sobre uma perna só diz sobre sua idade
Atualizadas recomendações médicas para prevenir derrame (AVC)
Microbiota intestinal: Microrganismos influenciam o corpo e a mente
Nosso cérebro vê frases curtas como se elas fossem imagens
Estudo revela ligações entre vários pesticidas e câncer de próstata
Exercícios moderados já reduzem risco de doenças cardíacas - mas mais é melhor
Caminhar dando arrancadas rápidas consome de 20% a 60% mais energia
Nossas memórias não ficam apenas nos nossos neurônios
Sensor a laser detecta primeiro sinal de ataque cardíaco em segundos


IA não consegue deduzir seus desejos e pensamentos (ainda)
Mídias Sociais: Pessoas interagem mais em postagens com as quais discordam
Usamos as opiniões dos outros, mas apenas se pouparem trabalho
Nossas memórias não ficam apenas nos nossos neurônios
Pessoas com menos recursos são vistas como menos confiáveis - mesmo por outras pessoas pobres
Exercícios moderados já reduzem risco de doenças cardíacas - mas mais é melhor
Implantes são esterilizados dentro do corpo usando luz e nanopartículas
Biochip detecta cânceres em uma hora
Nosso cérebro vê frases curtas como se elas fossem imagens
Curativo bioeletrônico combate infecções sem usar antibióticos
Vacina do Butantan contra dengue grave tem 89% de proteção
Brasil tem primeiras mortes por febre oropouche no mundo
Censo 2022: Por que várias cidades brasileiras tiveram diminuição da população?
Brasil tem primeiro caso de gripe aviária em aves domésticas
Brasil decreta emergência zoossanitária devido à gripe aviária
Proibido o uso de animais em pesquisas de cosméticos e higiene pessoal
A informação disponível neste site é estritamente jornalística, não substituindo o parecer médico profissional. Sempre consulte o seu médico sobre qualquer assunto relativo à sua saúde e aos seus tratamentos e medicamentos.
Copyright 2006-2024 www.diariodasaude.com.br. Todos os direitos reservados para os respectivos detentores das marcas. Reprodução proibida.